
NAO机器人代理商

机器人新闻
传统焊接技术和焊接机器人技术的区别
传统焊接技术和焊接机器人技术的区别,我们来看看!
连接板是工程起重机常用的部件,主要由底板和四个销柱组成。销柱与底板通过环形角焊缝焊接固定。以往的焊接方法采用手工CO2气体保护加药芯焊丝焊接工艺。由于焊缝是环形角焊缝,手工操作时容易造成焊缝外观质量差、焊接效率低、焊缝环线与焊接部位环线结合性差等缺点,容易造成脱焊。同时,为了保证焊缝的外观质量,焊接后需要用砂轮机打磨焊缝,容易造成焊接成本的增加。
传统焊接技术与焊接机器人技术的区别
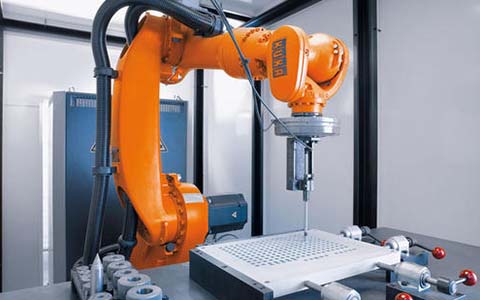
(1)焊接机器人的总体方案
根据连接板的尺寸、结构特点和焊缝形式,考虑到底板和四根销柱采用单面焊缝形式,焊缝在工件上分布规则均匀,所有焊缝的焊接都可以在焊接过程中不变位。为了降低成本,提高效率,在设计焊接机器人的整体方案时,决定不采用翻转工装等机器人周围设备,而是采用固定平台实现工件的焊接定位。同时,为了提高焊接效率,焊接机器人系统方案采用一机两工位的模式和H型布局。即机器人本体固定在两个自制焊接工作定位平台之间,工作时一个工位焊接机器人自动焊接人的一侧工件,另一个工位可以装卸工件,交替工作,保证机器人连续工作。
(2)选择机器人本体
机器人本体采用六自由度的关节焊接机器人,配有麦格米特全数字脉冲焊机电源,并配有自动清枪剪丝喷油装置和弧形安全防护装置,满足机器人使用过程中的安全防护和清枪需求。
(3)确定焊接工艺
焊接工艺采用富氩混合气体+实心焊丝代替原CO2气体+药芯焊丝。富氩保护焊具有熔池可见度好、操作方便、适用于全位焊接的优点。同时,电弧在保护气体的压缩下热量集中,焊接速度快,熔池小,热影响区窄,焊接变形小,抗裂性能好。在惰性气体的保护下,焊接质量好,非常有利于焊接过程中的机械化和自动化。但是,由于电弧的光辐射强,在焊接机器人的整体方案设计中,需要设计电弧安全保护装置进行安全保护。为了提高焊接效率,采用一次性焊接成型工艺,避免焊接机器人重复定位导致生产效率下降。
(4)焊接电源的选择
通过各种电源的试用,针对试用过程中的问题,结合工件的材料、形状特点、尺寸精度要求、焊缝长度和位置特点、焊接工作量和机器人的工作效率,焊接机器人系统采用全数字脉冲气体保护焊接电源,即脉冲MIG焊接工艺电源。众所周知,焊接过程中电弧控制的准确性决定了焊接质量的好坏。由于采用数字技术,控制系统的反馈时间比传统焊机减少了几个数量级,提高了反馈的准确性和灵敏度。采用脉冲焊接时,可以提供合适的脉冲波形,有效控制每个脉冲只过渡一个熔滴,使整个焊接过程中弧长保持不变,焊接过程中几乎没有飞溅,可以实现超低热输入的焊接。同时可以克服传统GMA焊机焊接后,焊丝末端会形成影响再引弧结球的缺陷,实现焊接质量与焊接效率的最佳匹配。
需要购买NAO机器人,欢迎咨询广州美达克数据科技有限公司
- 上一篇:码垛机器人在无人化工厂的使用
- 下一篇: 怎样选择机器视觉硬件的光源?
