
NAO机器人代理商

第六代nao机器人介绍
| 基本情况 | |
| 产品尺寸 (高×深×宽) |
1xRJ45- 10/100/1000 BASE T |
| 产品重量 | 5.48 kg/ 12.08 lb |
| 主板 | |
| CPU | CPU处理器:ATOM E3845 高速缓冲存储器:2MB 时钟速度:1.91GHz |
| 内存 | 4GB DDR3 |
| 闪速存储器 | 32GB eMMC |
| 语言 | |
| 语音合成&自动语音识别 | 中文、英语、捷克语、丹麦语、荷兰语、芬兰语、法语、德语、意大利语、日语、希腊语、波兰语、葡萄牙语(欧洲)、葡萄牙语(巴西)、西班牙语、瑞典语、俄语、土耳其语、阿拉伯语、巴西语、挪威语。 |
| 音频 | ||
| 声道 | 左声道 & 右声道 | |
| 扬声器 | 直径 | 40 mm |
| 阻抗 | 4Ω | |
| 扬声器级别 | 87dB/+/-3dB | |
| 频率范围 | 最高至~20 kHz | |
| 输入 | 2W | |
| 麦克风 | ×4头部 | |
| 灵敏度 | -12dBVPA@1KHZ | |
| 频率范围 | 100HZ至10KHZ | |
| LEDS | ||
| 位置 | 数量 | 说明 |
| 头部触觉传感器 | 12 | 16级白色 |
| 眼部 | 2×8 | RGB全彩 |
| 耳部 | 2×10 | 16级蓝色 |
| 胸部按钮 | 1 | RGB三原色全色 |
| 腿部 | 2×1 | RGB三原色全色 |


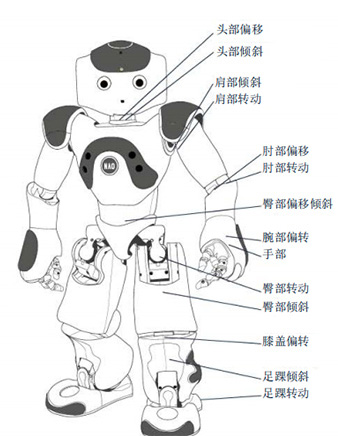
| 自由度 | |
| 头部 | 2 |
| 臂部(每侧) | 5 |
| 髋部 | 1 |
| 腿部(每侧) | 5 |
| 手部(每侧) | 1 |
| 电机规格 | |
| 电机类型 | 有刷直流空心杯 |
| 电机位置 | |||
| 齿轮传动比 | 电机类型 | ||
| 头关节 | 头部偏移 | 150.27 | 3 |
| 头部倾斜 | 173.22 | 3 | |
| 臂关节 | 肩部倾斜 | 150.27 | 4 |
| 173.22 | 3 | ||
| 肘部偏移 | 150.27 | 3 | |
| 肘部转动 | 173.22 | 3 | |
| 手关节 | 腕部偏移 | 50.61 | 2 |
| 手部 | 36.24 | 2 | |
| 腿关节 | 臀部偏移 | 201.3 | 1 |
| 臀部转动 | 201.3 | 1 | |
| 足踝倾斜 | 130.85 | 5 | |
| 足踝转动 | 130.85 | 5 | |
| 踝关节前后动 | 130.85 | 5 | |
| 踝关节左右动 | 201.3 | 1 | |
| 电机类型 | |||||
| 电机类型1 | 电机类型2 | 电机类型3 | 电机类型4 | 电机类型5 | |
| 型号 | 22NT82213P | 17N88208E | 16GT83210E | DCX 16S | 22NT Z20 |
| 空载转速(rpm) | 8700±10% | 8400±12% | 10700±10% | 11400±10% | 8700±10% |
| 堵转扭矩(mNm) | 65±8% | 9.4±8% | 14.3±8% | 22.4±10% | 65±10% |
| 连续扭矩(mNm) | 最大17.8 | 最大4.9 | 最大6.2 | 最大2.6 | 最大17.8 |
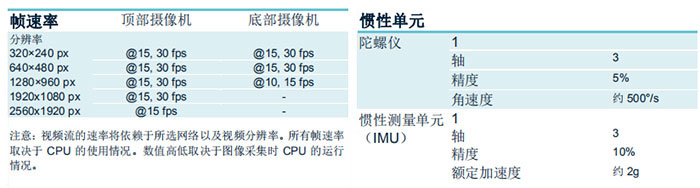
| 关节运动编码 | |
| MRE(磁性旋转编码器) | 36 |
| 使用霍尔效应传感器技术 | |
| 精度:12 bits/0.1° | |
| 网络连接 | |
| 以太网 | 1xRJ45- 10/100/1000 BASE T |
| WIFI | IEEE 802.11 a/b/g/n |
| WPAN IE EE | 4.0 (LE) |
| 802.15.1 (蓝牙) | |
| 软件 | |
| Open Nao | 嵌入式GNU |
| 基于Gentoo的Linux发行版 | |
| 架构 | 86 |
| 编程 | 内置: C++ / Python |
| 远程: Java | |
》》购买NAO机器人,咨询NAO机器人多少钱一台,欢迎致电:18928764315。
